Вот две картинки.
С первой все понятно - волновое управление.

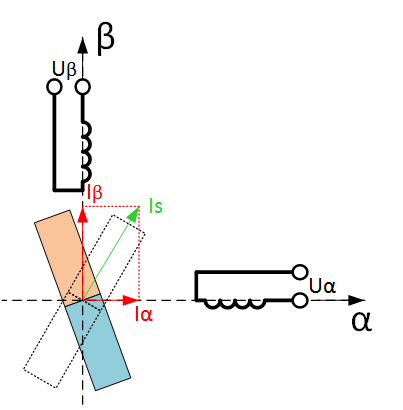
Вторая картинка - полный шаг.

Как заставить якорь стоять между двух катушек с одинаковым током? Он всегда прилипнет к одной из катушек, ведь сила взаимодействия двух магнитов тем выше, чем меньше расстояние между магнитами.
Драйвер контролирует ток, протекающий в обмотках и через него определяет положение ротора. Смещение ротора в сторону одной из катушек вызывает изменение тока в катушках за счет самоиндукции, драйвер ловит это изменение и временно отключает (закорачивает) обмотку, к которой устремился якорь. Чтобы такой принцип гарантированно работал, драйвер просто поочередно включает то одну, то другую обмотку, и если надо, сместить якорь, изменяет скважность импульсов напряжения. На ту обмотку, к которой устремился якорь, длину импульса напряжения уменьшает, на другую увеличивает. Якорь идет обратно и возвращается в среднюю точку.