Страница 7 из 8
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 01 авг 2013, 10:46
Nick
Это скорее всего нет... Разве что писать специальную кинематику...
по идее если написать кинематику таким образом, чтобы ось A учасвствовала в перемещении в глобальных XYZ - то скорость перемещений должна снизиться...
Есть еще штука для токарных станков CSS- constant surface speed - она изменяет скорость шпинделя в зависимости от расстояния до центра вращения... Может ее как-то использовать?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 01 авг 2013, 11:16
MihailCarib
Суть-то одна, можно попробовать и CSS этот. Только я не очень представляю, там на шпинделе мотор с обратной связью, серва, ну или датчик положения. Я вот вчера покопался, нашел вот такую штуку:
аxis.N.free-vel-lim OUT FLOAT .The velocity limit for the free planner
Но что это за свободный планировщик такой, не нашел. Идея такая: динамически ограничивать предел угловой скорости поворотной оси в зависимости от положения Z. Пусть себе упирается в предел и быстрее не едет.
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 01 авг 2013, 11:23
Nick
А там их несколько таких пинов....
axis.N.free-pos-cmd OUT FLOAT
The "free planner" commanded position for this joint.
axis.N.free-tp-enable OUT BIT
TRUE when the "free planner" is enabled for this joint
axis.N.free-vel-lim OUT FLOAT
The velocity limit for the free planner
хммм что это такое вообще free planner?!?

Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 08:17
MihailCarib
Nick писал(а):А там их несколько таких пинов....axis.N.free-pos-cmd OUT FLOATThe "free planner" commanded position for this joint.axis.N.free-tp-enable OUT BITTRUE when the "free planner" is enabled for this jointaxis.N.free-vel-lim OUT FLOATThe velocity limit for the free plannerхммм что это такое вообще free planner?!?
Во-во, я их тоже находил, тоже не знаю, что это. Но есть у меня подозрение такое, что речь идет не о планировании, а о холостом перемещении.
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 10:29
Nick
Странно... А можешь посмотреть, что появляется на пине axis.N.free-pos-cmd OUT FLOAT
Насколько это похоже на то, что у обычного планировщика?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 11:28
Serg
В дистрибутиве есть вот такая картинка:
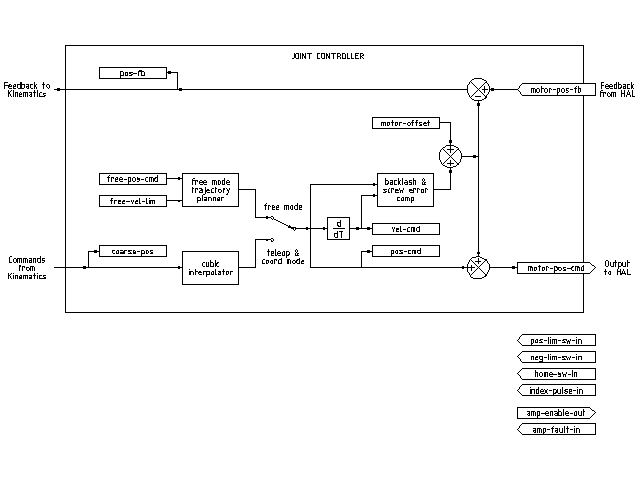
- emc2-motion-joint-controller-block-diag.png (6.89 КБ) 3235 просмотров
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 11:41
Nick
Хмм.... а может этим freemode можно управлять когда надо поменять фрезу - ставим feedhold, переключаемся в freemode и поехали?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 19:22
MihailCarib
Nick писал(а):Странно... А можешь посмотреть, что появляется на пине axis.N.free-pos-cmd OUT FLOAT
Насколько это похоже на то, что у обычного планировщика?
Сегодня не был на работе, как смогу гляну
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 22:54
nkp
MihailCarib писал(а):аxis.N.free-vel-lim OUT FLOAT .The velocity limit for the free planner
Но что это за свободный планировщик такой,
скорей всего здесь речь идет о режимах
free , teleop , coord
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 02 авг 2013, 23:06
Nick
nkp, спасибо!

Я этой страницы и не видел!
В общем понятно, это не оно.
Надо наверное кинематику попробовать переписать....
Как у тебя оси расположены?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 03 авг 2013, 11:28
MihailCarib
Стандартно: в горизонтальной плоскости X и Y, Z - вверх , A вдоль оси Y
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 03 авг 2013, 13:06
Nick
угу...
значит надо написать хитрую кинематику.
Берем за пример trivkins.c
tps://github.com/cnc-club/linuxcnc/blob/master/src/emc/kinematics/trivkins.c
Что надо поменять:
1. kinematicsForward
2. kinematicsInverse
Будем делать вид, что у нас кинематика не XYZA, а XYZU - т.е. мы как бы вращаем не заготовку, а инструмент.... только честно говоря не знаю, что у нас при этом получится с пределами осей.
Таким образом
kinematicsForward
Код: Выделить всё
float c,s;
c = cos(joints[6]);
s = sin(joints[6]);
pos->tran.x = joints[0]*c - joints[2]*s;
pos->tran.y = joints[1];
pos->tran.z = joints[0]*s + joints[2]*c;
pos->a = joints[3];
pos->b = joints[4];
pos->c = joints[5];
pos->u = joints[6];
pos->v = joints[7];
pos->w = joints[8];
return 0;
kinematicsInverse
Код: Выделить всё
c = cos(pos->tran.u);
s = sin(pos->tran.u);
joints[0] = pos->tran.x*c + pos->tran.z*s;
joints[1] = pos->tran.y;
joints[2] = pos->tran.x*s - pos->tran.z*c;
joints[3] = pos->a;
joints[4] = pos->b;
joints[5] = pos->c;
joints[6] = pos->u;
joints[7] = pos->v;
joints[8] = pos->w;
return 0;
вроде как-то так...
nkp, не помнишь, кинематики устанавливаются через comp install или как-то по другому?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 03 авг 2013, 14:58
nkp
да
sudo comp --install trivkinsnew.c
в hal строку loadrt trivkins заменить на loadrt trivkinsnew
trivkinsnew - это имя нашей новой кинематики (ну или любое другое)))
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 03 авг 2013, 20:55
Nick
В компоненте есть строка с названием кинематики надо ее тоже поправить.
ЗЫ надо бы все это как то оформить и сделать нормальную универсальную кинематику для поворотной оси...
Надо только продумать параметры - координаты оси вращения параллельность поповротной оси. Или может навсегда закрепить, что поворотная ось параллельна оси X или Y...
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 03 авг 2013, 23:11
Energizer
на днях купил таки поворотку, правда еще не подсоединял, и даже не тестил - работы пока много текущей.
Смущает одно: она уже снабжена двигателем 54 серии. У меня же стоят все движки 86 серии. Да к тому, же напряжение 70 воль и по 6 ампер на двигатель.
хотел просто выдергивать шнур с оси икс, и вместо него ставить поворотку(просто менять штекер)
но чую придется еще и драйвер переключать на 2,5 ампера. Вольтаж думаю такой сожрет. Если не удовлетворюсь результатами, буду мастрячить 86 двигатель.
Мой станок работает с пульта, в программе по загрузке и настройке пульта есть опция, ориентированная на вращение - короче предстоит либо много гемора - либо будет все предельно просто. У кого нить есть на станке с пультом вращалка? как работаете? что перенастраивали?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 04 авг 2013, 11:41
MihailCarib
Ух! Спасибо! Пока не очень понятно, но сейчас специально поеду к станку, попробую разобраться.
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 04 авг 2013, 15:05
MihailCarib
Разобраться не получилось: ругается в консоли, пишет sudo:comp: command not found
победить эту штуку пока не могу. У пользователя все права администратора включил, apt-get install sudo пробовал, что он еще от меня хочет, не представляю...
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 04 авг 2013, 15:13
nkp
нужно поставить linuxcnc-dev:
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 06 авг 2013, 15:38
MihailCarib
Спасибо, извините, что не отвечаю долго - дома интернет накрылся.
Эта штука inuxcnc-dev требует подключения к инету, я не смогу на рабочую машину инет поставить... Как установить локально?
Re: Поворотная ось (статуэтки, балясины).
Добавлено: 07 авг 2013, 07:04
nkp
MihailCarib писал(а):локально?
.deb пакета не "обнаружено" - а как иным способом установить соблюдая все зависимости я не знаю...
конечно можно и комп (или винт) привезти и подключить к сети - но наверно есть и "правильное" решение...
если скачать полный пакет с
linuxcnc -
то остается "натравить" apt-get на этот пакет ...
(остается открытым вопрос - как это сделать)